

TRAVAUX DE DESIGN
Sujet: "CALCUL D'UN COURT-CIRCUIT À DEUX PHASES"
But du travail: Développement de compétences dans le calcul des courts-circuits dans les circuits électriques.
Option numéro 2.
Tâche numéro 1.La figure 1 montre un diagramme à deux phases court-circuit. Identifier:
1. L'impédance d'une séquence directe de deux phases (2Zφ);
2. Courant de court-circuit (Iк);
3. Phase EMF (EA).
Etant donné que la tension pour un court-circuit biphasé ne contient aucun composant homopolaire en tout point du réseau, la condition suivante doit être remplie:
3Uo = UAK + UBK + UCK = 0, avec UA = EA
Fig. 1. Circuit de court-circuit biphasé
Données initiales: ZВ = 25 Ohm; ZС = 15 Ohm; EBU = 90 V; UVK = 100 V.
Progrès
La figure 1 montre le court-circuit métallique entre les phases Dans le et C LEP. Sous l'action entre phase emf UEM (Fig. 1) il y a des courants de court-circuit JeVk etJeSk.
Leurs valeurs sont déterminées par la formule:
JePour(2) = UEM /2 ZF, (1)
où 2 ZF - Impédance d'une séquence directe de deux phases.
Impédance de séquence directe 2 ZF est déterminé par la formule:
2 ZF= ZDans le+ ZC, (2)
où ZDans le, ZC - impédance des phases B et C, respectivement.
1. Selon la formule (2), on détermine l'impédance de la séquence directe de deux phases (2Zφ):
2 ZF= 25 Ohm + 15 Ohm = 40 Ohm.
2. En utilisant la formule (1), nous déterminons le courant d'un court-circuit biphasé:
JePour(2) = 90 V / 40 Ω = 2,25 A.
Les courants dans les phases défectueuses sont de valeur égale, mais sont opposés en phase, et le courant dans la phase non endommagée est nul (lorsque la charge n'est pas prise en compte): JeVk= JeSk, IA = 0.
Le courant homopolaire (NP) avec défaut biphasé est absent, puisque la somme des courants des trois phases Je Un+ Je B+ Je C= 0 .
Tension de la phase non endommagée Un est la même à tout point du réseau et est égale à la phase emf: U Un= E Un. Depuis la tension entre phases au court-circuit métallique au point de défaut U BCà= U Bà – U Cà = 0, puis U Bà = U Cà,
c'est-à-dire que les tensions de phase des phases endommagées sur le site de la panne sont égales en valeur absolue et coïncident en phase.
Etant donné que les tensions de phase pour un court-circuit biphasé ne contiennent pas les composants du NP, la condition suivante doit être satisfaite en tout point du réseau:
Étant donné que à la place des fautes U BK= U CK et U AK= E Un, nous trouvons
![]() (3)
(3)
Par conséquent, à l'emplacement du défaut, la tension de chaque phase endommagée est égale à la moitié de la tension de la phase non endommagée et à l'inverse du signe.
3. A partir de la formule (3) nous déterminons la phase EMF de la phase non endommagée (EA):
EA =– UBK / 2.
EA =– 100 V /2 = – 50 V.
Les courts-circuits biphasés ont deux caractéristiques:
1) les vecteurs de courants et de tensions forment un système asymétrique mais équilibré, ce qui indique l'absence des composantes du NP. La présence d'un déséquilibre indique que les courants et les tensions ont des composantes de séquence négative (DO) avec une ligne droite;
2) des tensions de phase, même dans la localisation des défauts sensiblement supérieur à zéro, seule une tension phase à phase est réduit à zéro, et les deux autres la valeur est de 1,5 UF. Par conséquent, un défaut de court-circuit biphasé est moins dangereux pour la stabilité des EPS et des consommateurs d'électricité qu'un triphasé.
Tâche numéro 2.
Dessinez un schéma de la connexion du transformateur de tension à l'étoile. Expliquer le travail de ce régime. |
|
Selon GOST 11677-75, le début et la fin des enroulements primaires et secondaires des transformateurs sont désignés dans un certain ordre. L'enroulement des transformateurs monophasés est indiqué par les lettres A, a, et les extrémités par X, x. Les grandes lettres désignent les enroulements supérieurs et les petits les enroulements de tension inférieure. Si, en plus du primaire du transformateur secondaire et il y a un troisième enroulement à une tension intermédiaire, le début et la fin de désigner Am Xm.
Dans les transformateurs triphasés, les extrémités et les extrémités des enroulements désignent: A, B, C; X, Y, Z - tension plus élevée; Am, Bm, Cm; Xm, Ym, Zm - contrainte moyenne; a, b, c; x, y, z - tension inférieure. Le transformateur triphasé avec une étoile dans une phase de composé autre que le début de l'enroulement est parfois sorti et neutre, ie. E. Un point commun reliant les extrémités des enroulements. Il est noté О, Оm et о. La figure 1, a, b montre les schémas de connexion des enroulements dans l'étoile et le triangle tels qu'ils sont représentés pour les transformateurs triphasés.
DIV_ADBLOCK258 "\u003e
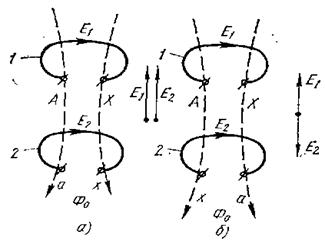
a - la fem de E1 et E2 coïncident en phase; b - les emfs E1 et E2 sont déphasés de 180 °; 1 - tour de l'enroulement primaire; 2 - tourner enroulement secondaire
Figure 2 - Déplacement angulaire des vecteurs forces électromotrices en fonction de la fin de l'enroulement
Supposons maintenant que nous avons changé les désignations du début et de la fin de la bobine dans l'enroulement secondaire (Figure 2, b). Aucun changement dans le processus d'orientation physique fem ne se produit pas, mais par rapport aux extrémités de la direction de la bobine du fem est inversé, à savoir, il ne vise pas du début à la fin, et vice versa - .. A la fin de (x) vers le haut (a). Comme rien n'a changé dans la bobine 1, il faut supposer que les emfs E1 et E2 sont déphasés de 180 °. Ainsi, une simple modification des désignations des extrémités équivaut à un déplacement angulaire du vecteur électromotrice dans l'enroulement de 180 °.
Cependant, la direction de la fem peut également changer dans le cas où les débuts et les fins des enroulements primaire et secondaire sont situés de manière identique. Le fait est que les enroulements du transformateur peuvent être effectués par la droite et la gauche. L'enroulement est appelé droit, si ses enroulements sont dans le sens des aiguilles d'une montre dans l'enroulement, c'est-à-dire, empilés sur la ligne de vis droite (figure 3, enroulement supérieur). L'enroulement est appelé celui de gauche, si ses enroulements sont placés dans le sens inverse des aiguilles d'une montre pendant l'enroulement, c'est-à-dire qu'ils sont placés le long de la ligne de vis gauche (Figure 3, enroulement inférieur).
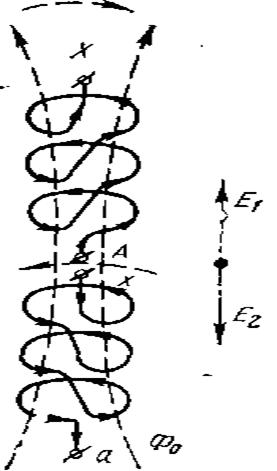
Figure 3 - Déplacement angulaire des vecteurs EMF en fonction de la direction d'enroulement des enroulements
Comme on peut le voir sur la figure, les deux enroulements ont la même désignation des extrémités. En raison du fait que les enroulements sont percés par le même flux, à chaque tour, la direction de la force électromotrice sera la même. Cependant, en raison de l'enroulement différent, la direction de l'EM total de tous les spires connectées dans chaque enroulement est différente: dans la FEM primaire, elle est dirigée du début A à l'extrémité X, et dans le secondaire de l'extrémité x au commencement a. Ainsi, même avec la même désignation des extrémités, la force électromotrice des enroulements primaire et secondaire peut être décalée d'un angle de 180 °.
Dans un transformateur monophasé, les vecteurs de la fem de l'enroulement peuvent coïncider ou être opposés (figure 4, a, b). Si un tel transformateur fonctionne seul, pour les consommateurs, peu importe comment la force électromotrice est dirigée dans ses enroulements. Mais si trois transformateurs monophasés travaillent ensemble sur une ligne courant triphasépour un bon fonctionnement, il est nécessaire que dans chacun d'eux les vecteurs électro-femelles soient dirigés ou comme indiqué sur la figure 4a, ou, comme le montre la figure 4b., b.
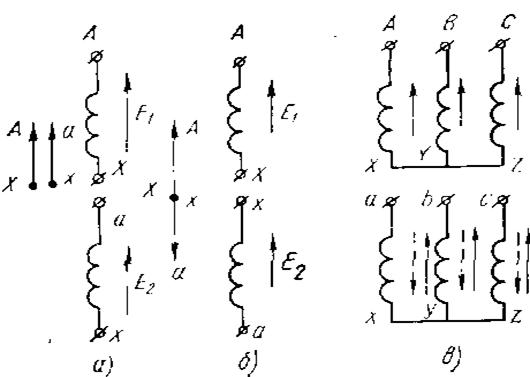
a, b - monophasé; in - triphasé
Dans la même mesure, cela s'applique à chaque transformateur triphasé. Si dans les enroulements primaires la fem dans toutes les phases a la même direction, alors dans les enroulements secondaires, la direction de la fem doit nécessairement être la même (figure 4, c). Evidemment, dans les enroulements secondaires, le sens de l'enroulement et la désignation des extrémités doivent également être les mêmes.
Si l'enroulement est enroulé par erreur avec une direction d'enroulement différente, ou si les extrémités sont incorrectement connectées, la tension reçue par les consommateurs diminue brusquement, et le fonctionnement normal est perturbé. Des conditions particulièrement défavorables apparaissent lorsque plusieurs transformateurs fonctionnent simultanément à partir d'un réseau, dans lequel les déphasages entre les emfs linéaires sont différents. Afin d'éviter des perturbations dans le travail des consommateurs, il est nécessaire d'avoir des transformateurs avec des déplacements angulaires définis des vecteurs de la fem des enroulements.
Les directions des vecteurs emf et les déplacements angulaires entre eux sont généralement caractérisés par des groupes de liaisons d'enroulement. Dans la pratique, les vecteurs de déplacement angulaire EMF enroulement BT et MT par rapport aux vecteurs désignés nombre d'enroulement haute tension emf qui, lorsqu'il est multiplié par 30 °, l'angle donne les vecteurs de décalage. Ce numéro est appelé le groupe d'enroulement du transformateur.
Ainsi, lorsque les vecteurs fem de l'enroulement coïncident dans la direction (déplacement angulaire de 0 °), on obtient le groupe de composé 0 (figure 4, a). Le déplacement angulaire de 180 ° (Fig. 4, b) correspond au groupe 6 (30 x 6 = 180 °). Comme nous l'avons vu, dans les enroulements des transformateurs monophasés, seuls de tels déplacements angulaires peuvent être, donc seulement 0 et 6 groupes de composés sont possibles. Les connexions d'enroulement des transformateurs monophasés pour la brièveté sont I / I-0 et I / I-6.
Les enroulements de transformateur triphasé peuvent être connectés en étoile ou un triangle 12 peuvent être formés avec divers groupes de vecteurs de force électromotrice de déphasage linéaire de 0 à 360 ° par 30 °. Sur les douze groupes de composés possibles en Russie, deux groupes sont standardisés: le 11ème et le 0ème avec des déphasages de 330 et 0 °.
Considérons, par exemple, les schémas de connexion Y / Y et Y / Δ (Figure 5, a, b). Les enroulements situés sur une tige, nous en représentons un sous un autre; L'enroulement de tous les enroulements (primaires et secondaires) sera le même; les directions de la phase emf sont indiquées par des flèches.
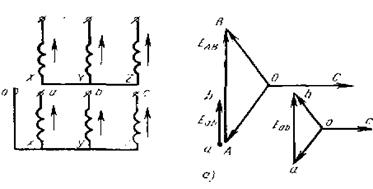
Figure 5 - Préparation du groupe de composés à Wye - star (a) la construction d'un diagramme vectoriel de la FEM de l'enroulement primaire (figure 5a) de sorte que la phase de vecteur force électromotrice C est horizontal. En reliant les extrémités des vecteurs A et B, on obtient le vecteur de l'emf linéaire EAB (AB). Nous construisons un diagramme vectoriel de la fem de l'enroulement secondaire. Etant donné que la direction de la fcem des enroulements primaire et secondaire sont identiques, emf des vecteurs de phase de l'enroulement secondaire construire des vecteurs en parallèle à l'enroulement primaire correspondant. En reliant les points a et b et joindre vecteur Eab (ab) jusqu'à un point A, on voit que le déplacement angulaire entre le primaire emf linéaire et des enroulements secondaires est égale à 0. Ainsi, dans le premier exemple, le groupe d'enroulements 0. Ce composé désigné en tant que: Y / Yn -0 , que "l'étoile avec le neutre déduit" est lue.
En considérant le deuxième exemple (figure 5, b), nous voyons que le diagramme vectoriel de la fem de l'enroulement primaire est construit de la même manière que dans l'exemple précédent. Lors de la construction d'un schéma de vecteur force électromotrice de l'enroulement secondaire doit se rappeler que lors d'une connexion en triangle et emf de phase linéaire coïncide à la fois en amplitude et en direction.
Nous construisons le vecteur emf de la phase c, en le dirigeant parallèlement au vecteur C de l'enroulement primaire. la phase de fin (point Z) est relié avec le début de la phase b, de sorte que de l'extrémité du vecteur de procéder à la phase b emf vecteur parallèle au vecteur V. L'extrémité de la phase b est reliée à la phase de démarrage et, par conséquent, à partir de l'extrémité du vecteur b (points at) phase conductrice et le vecteur EMF parallèle au vecteur A. Dans le triangle fermé abc, le vecteur ab est emf linéaire Eb. En ajoutant le vecteur Eab au point A, on voit qu'il est décalé de 30 ° par rapport au vecteur EAB dans le sens de l'avance. Par conséquent, le vecteur Eab est décalé de 330 ° (30 ° x 11 = 330 °) par rapport au vecteur de l'enroulement de la force électromotrice HV. Ainsi, dans cet exemple, un groupe de connexion enroulement 11. Ceci est indiqué que: Y / Δ -11, qui se lit comme suit: « étoile - delta - onze ans. »
Dans un transformateur à trois enroulements, le groupe d'enroulement est défini de manière similaire; tandis que les enroulements sont considérés par paires: le primaire et l'un des deux autres. Si la désignation commune Yn / Y / Δ - 0 - 11, alors il doit être lu comme suit :. "Star dérivé du neutre - étoile - triangle - zéro - 11" Cela signifie que le considéré transformateur à trois enroulements enroulement monté en étoile BH en sortie à partir du point zéro, le CH enroulement - dans une étoile d'enroulement LV - un triangle, un groupe de composé BH, et des enroulements CH - zéro enroulement HT et BT - 11.
Nous avons considéré que deux composés du groupe - 0 et 11. Modification de la désignation de tous (par notation de mouvement circulaire), vous pouvez obtenir d'autres groupes de 1 à 10. Cependant, ces groupes ne trouvent pas la distribution et extrêmement rares. En russe normalisé seulement trois groupes: Y / Y - 0, Y / Δ - pour les transformateurs triphasés 11, I / I - 0 - pour les transformateurs monophasés.
Références
1. et d'autres.Électrotechnique.,: Proc. manuel pour les universités. - Moscou: Energoatomizdat, 2007. - 528 p., Ill.
2., Nemtsov: Proc. manuel pour les universités. - 4 e éd., Pererab. - Moscou: Energoatomizdat, 2009. - 440 p., Ill.
3. Principes fondamentaux de l'électronique industrielle: un manuel pour les non-électrotechniques. spec. universités, M. Knyazkov, E. Krasnopolsky, Ed. . - 3ème éd., Pererab. et supplémentaire. - M .: Enseignement supérieur. shk., 2006. - 336 p., ill.
4. Génie électrique et électronique dans 3 livres. Ed. Livre 1. Circuits électriques et magnétiques. - M: École supérieure. - 2006
5. Génie électrique et électronique dans 3 livres. Ed. Kn.2. Dispositifs électromagnétiques et machines électriques. - M: École supérieure. - 2007
Courant de court-circuit triphasé du réseau d'approvisionnement est déterminé en kiloamperes par la formule:
où U Н НН - tension nominale moyenne phase-phase, prise comme base; pour les réseaux de 0,4 kV, la tension de base est de 400 V;
La résistance totale totale du circuit au point de court-circuit triphasé, qui est la résistance de la séquence directe et est déterminée par la formule en milliom:
où R 1Σ est la résistance active totale du circuit au court-circuit, mΩ;
X 1Σ - résistance inductive totale au point de court-circuit, mΩ.
La résistance active totale inclut la résistance des éléments suivants:
La résistance inductive totale contient la résistance des éléments suivants:
Courant de K3 en deux phasesest déterminé en kilomètres selon la formule suivante:
![]() ,
,
où est la tension nominale moyenne entre phases acceptée comme référence, V;
et - la somme totale des résistances des séquences directe et inverse, et, de manière équivalente, mΩ.
L'expression (19) peut s'écrire comme suit
![]() =,
=,
où est l'impédance du circuit à la position de K3 pour un court-circuit biphasé, mΩ.
![]() ,
,
Le courant de court-circuit monophasé est déterminé par la formule:
La résistance active et inductive totale de la séquence zéro à la position de K3, respectivement, mΩ.
36. Résistance thermique des appareils.
Résistance thermique appareil électrique appelé la capacité de les supporter sans dommages, empêchant d'autres travaux, l'effet thermique des courants circulant à travers des parties transportant le courant d'une durée donnée. La caractéristique quantitative de la stabilité thermique est le courant de résistance thermique, qui coule pendant une certaine période de temps. Le plus intense est le mode court-circuit, dans lequel les courants peuvent augmenter plusieurs fois par rapport aux courants nominaux, et la puissance des sources de chaleur peut être augmentée des centaines de fois.
37. Stabilité dynamique des appareils
Stabilité électrodynamique appareil est appelé sa capacité à résister forces électrodynamiques (EDE), qui est apparue lors du passage des courants de court-circuit. Cette valeur peut être exprimée soit directement par la valeur d'amplitude du courant je din , dans lequel les contraintes mécaniques dans les détails de l'appareil ne dépassent pas les limites de valeurs admissibles, ou par la multiplicité de ce courant par rapport à l'amplitude courant évalué. Parfois, la résistance électrodynamique est évaluée par les valeurs actuelles du courant dans une période (T = 0,02 s, f = 50 Hz) après le début du court-circuit.
38. L'ordre de calcul des courants de court-circuit.
Un court-circuit (KZ) est la connexion de parties actives de phases ou de potentiels différents entre eux ou au boîtier d'équipement connecté à la terre dans des réseaux électriques ou dans des récepteurs électriques. Un court-circuit peut se produire pour diverses raisons, par exemple, la détérioration de la résistance d'isolement: dans un milieu humide ou chimiquement actif; avec un chauffage ou un refroidissement inadmissible de l'isolation; défaillance mécanique de l'isolation. Un court-circuit peut également se produire à la suite d'actions erronées du personnel pendant le fonctionnement, l'entretien ou la réparation, etc.
En cas de court-circuit, le trajet du courant est "raccourci", puisqu'il passe le long du circuit en contournant la résistance de charge. Par conséquent, le courant augmente à des valeurs inacceptables si l'alimentation du circuit ne s'éteint pas sous le dispositif de protection. La tension ne peut pas être déconnectée même s'il y a un dispositif de protection si un court-circuit s'est produit à un point éloigné et, par conséquent, la résistance circuit électrique sera trop élevé, et la valeur actuelle pour cette raison ne sera pas suffisante pour déclencher le dispositif de protection. Mais un courant de cette ampleur peut être suffisant pour créer une situation dangereuse, par exemple, pour enflammer les fils. Le courant de court-circuit produit également un effet électrodynamique sur les dispositifs électriques - les conducteurs et leurs parties peuvent se déformer sous l'action des forces mécaniques qui se produisent à des courants élevés.
En partant de ce qui précède, les dispositifs de protection doivent être choisis en fonction des conditions d'intensité du courant de court-circuit (force électrodynamique, indiquée en kA) à l'endroit de leur installation. A cet égard, lors du choix d'un dispositif de protection, il devient nécessaire de calculer le courant de court-circuit (TKZ) du circuit électrique. Courant de court-circuit pour circuit monophasé peut être calculé par la formule:
où Ik est le courant de court-circuit, Uf est la tension de phase du réseau, Zn est la résistance de la boucle (boucle) phase-zéro, Zm est l'impédance de l'enroulement de phase du transformateur du côté basse tension.
où Rn est la résistance d'un fil du court-circuit.
où ro - résistivité conducteur, L est la longueur du conducteur, S est la section transversale du conducteur.
Xp est la résistance inductive d'un fil d'un court-circuit (généralement prise à 0,6 ohm / km).
Tension de court-circuit du transformateur (en% de Un):
D'où l'impédance de l'enroulement de phase du transformateur (Ohm):
où Ucz - tension de court-circuit du transformateur (en% de U) est donnée dans les livres de référence; Un- tension nominale Transformateur, courant nominal IN du transformateur - sont également pris dans les répertoires.
Les calculs sont effectués au stade de la conception. En pratique, déjà installations existantes il est difficile de le faire en raison d'un manque de données d'entrée. Par conséquent, lors du calcul du courant de court-circuit, dans la plupart des cas, il est possible de prendre la résistance de l'enroulement de phase du transformateur Zm à 0 (valeur réelle ≈ 1 ∙ 10-2 Ohm), puis:
Ces formules conviennent à des conditions idéales. Malheureusement, ils ne prennent pas en compte des facteurs tels que la torsion, etc., qui augmentent le composant actif de la chaîne Rn. Par conséquent, seule la mesure immédiate de la résistance de la boucle "phase-zéro" peut donner une image précise.
39. Courant de déclenchement, consigne de courant, courant de coupure du disjoncteur.
Libération
Le courant circulant dans le disjoncteur électromagnétique du disjoncteur conduit à l'arrêt de la machine à un excès rapide et significatif sur le courant nominal du disjoncteur, ce qui se produit généralement en cas de court-circuit dans le câblage protégé. Un court-circuit correspond à un courant fort croissant très rapidement, qui est pris en compte par le dispositif libération électromagnétique, qui permet pratiquement instantanément d'influencer le mécanisme de déclenchement du disjoncteur par une augmentation rapide du courant circulant le long de la bobine du solénoïde de déclenchement. La vitesse de fonctionnement de la libération électromagnétique est inférieure à 0,05 seconde.
Point de consigne Le courant sur l'échelle est marqué par l'usine; dans la table, partout, sauf cas particulier, il est indiqué en pourcentage du courant nominal du déclencheur. Entre les limites inférieure et supérieure indiquées sur la balance, les réglages sont ajustés en douceur.
Clipping epuis la valeur minimale du courant, ce qui provoque un fonctionnement instantané de la machine).
But et conditions pour la construction de diagrammes vectoriels.Pour comprendre les conditions de fonctionnement du relais, il convient d'utiliser des diagrammes vectoriels des tensions et courants qui leur sont appliqués. Les hypothèses initiales suivantes ont servi de base à la construction de diagrammes vectoriels: pour simplifier, on considère le moment initial d'un court-circuit sur une ligne électrique avec une alimentation unilatérale en l'absence de charge (Fig. 1.3, un) pour obtenir les angles réels de déphasage entre courants et tensions, la chute de tension est prise en compte non seulement dans la résistance inductive mais aussi dans la résistance active R les défauts du circuit; Le système électrique fournissant l'emplacement de défaut est remplacé par un générateur équivalent avec une fem de phase EUn, EDans le, EC, représentant un symétrique et équilibré *1 un système de vecteurs par rapport auquel les vecteurs de courants et de tensions sont construits.
Pour simplifier les défauts métalliques de cartographie, dans lequel la résistance de contact au point de défaut rp = 0. Pour direction positive des courants prinimaetsyaih direction de l'alimentation de la faute, EMF positive et la chute de tension respectivement considéré dont les directions coïncident avec le sens du courant positif habituellement considéré.
Diagramme vectoriel au court-circuit triphasé. Dans la figure 1.4, un une ligne de transmission est représentée sur laquelle une fermeture métallique de trois phases s'est produite au point K. La construction d'un diagramme vectoriel (Fig.1.4, b) commence par la phase emf EUn, EDans le, EC. Sous l'action de la phase emfs, un courant de court-circuit apparaît dans chaque phase:
Où EF - phase EMF du système; ZC,Gt;XC;ZL.K,RL.K,XL.K - la résistance du système et la section endommagée de la ligne électrique (Figure 1.4, un).
Courants Iak =Iç =IСк =Ik avoir un déphasage par rapport à l'emf correspondante:
![]()
 |
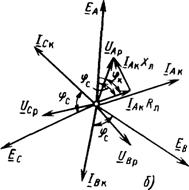 |
Fig.1.4. Court-circuit triphasé: un - régime b - Diagramme vectoriel des courants et des tensions |
|
Voltages au point Pour sont égaux à zéro: UAk = UBk = UCk = 0. Tensions de phase sur le site d'installation de la RZ, au point P (Fig.1.4, un), UAP =JeAkRL.K +j JeAkXL.K sont déterminés sur le diagramme (Fig.1.4, b) comme la somme des chutes de tension dans la résistance active JeAkRL, qui coïncide en phase avec le vecteur JeAket dans la réactance JeAkXL, déplacé de 90 ° par rapport à JeAk. De même, les vecteurs U
BPet U
CP. Modules (valeurs absolues) U
AP, U
BP,U
CP ont les mêmes valeurs, chacun de ces vecteurs est en avance sur le courant de la phase avec le même nom d'un angle φк =arctg (XL.K /RL.K). Pour les lignes de transmission de 35 kV, cet angle est de 45 - 55 °, 110 kV - 60 à 78 °, 220 kW (un fil en phase) - 73-82 °, 330 kW (deux fils en phase) - 80 à 85 °, 500 kV (trois fils en phase) - 84-87 °, 750 kV (quatre fils en phase) - 86-88 °. Plus grande valeur φк correspond à une plus grande section du fil, car plus la section est grande, plus la section R.
Parmi les diagrammes de court-circuit triphasé ci-dessus suit: 1) le diagramme vectoriel de courant et de tension sont symétriques et équilibrés, puisque ce ne sont pas des composants de séquence négative et zéro; 2) le court-circuit triphasé est accompagné d'une forte diminution de tous les tensions de phase (à la fois à la place des fautes, et à proximité). À la suite de cela K (3) est le dommage le plus dangereux pour la stabilité du fonctionnement parallèle du réseau électrique et des consommateurs d'électricité.
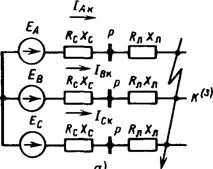
Court-circuit biphasé. Dans la figure 1.5, un Court-circuit métallique entre phases Dans le et C LEP. Sous l'action d'une FEM de phase à phase UEM (Fig.1.5, un) il y a des courants de court-circuit Iкk etIСк.
Leurs valeurs sont déterminées par la formule IK (2) = EBU / 2ZF, où 2 ZF - impédance de séquence directe de deux phases ( 2 ZF =Z +ZС). Les courants dans les phases défectueuses sont de valeur égale, mais sont opposés en phase, et le courant dans la phase non endommagée est nul (lorsque la charge n'est pas prise en compte):
Le courant homopolaire (NP) à K (2) Depuis la somme des courants des trois phases Je A +Je B +Je C = 0.
Pour. Dans la figure 1.5, b la phase EMF et EMF entre les phases endommagées sont construites ESoleil. Vecteur de courant de court-circuit JekV est derrière la fem ![]()
Tension de la phase non endommagée Un est la même à tout point du réseau et est égale à la phase emf: U A =E Un. Depuis la tension entre phases au court-circuit métallique au point de défaut U BCк =U Bk - U Cc= 0, alors:
Ie. Les tensions de phase des phases endommagées au point de défaillance sont égales en valeur absolue et coïncident en phase.
Etant donné que les tensions de phase pour un court-circuit biphasé ne contiennent pas les composants du NP, la condition suivante doit être satisfaite en tout point du réseau:
Étant donné que à la place des fautes U BK =U CKet U AK =E A,nous trouvons
![]() (1.3b)
(1.3b)
Par conséquent, à l'emplacement du défaut, la tension de chaque phase endommagée est égale à la moitié de la tension de la phase non endommagée et à l'inverse du signe. Sur le vecteur de diagramme U AK coïncide avec le vecteur E Unet les vecteurs U BK et U CK- sont égaux entre eux et sont opposés en phase au vecteur E Un.
Diagramme de vecteur au point P est montré dans la Fig. 1.5, dans le. Les vecteurs actuels restent inchangés. Les contraintes des phases Dans le et C au point P sont égaux:
Le plus loin le point P est loin du lieu de la faute, le plus de tension: U BSR= U BP– U SR U AP= E Un. Le vecteur actuel Je BP en retard par rapport à la tension de phase à phase U BCP à un angle φк =arctg(XL/ RL) .
Les courts-circuits biphasés ont deux caractéristiques:
1) les vecteurs de courants et de tensions forment un système asymétrique mais équilibré, ce qui indique l'absence des composantes du NP. La présence d'un déséquilibre indique que les courants et les tensions ont des composantes de séquence négative (DO) avec une ligne droite;
2) des tensions de phase, même dans la localisation des défauts sensiblement supérieur à zéro, seule une tension phase à phase est réduit à zéro, et les deux autres la valeur est de 1,5 UF. Par conséquent, un court-circuit biphasé est moins dangereux pour la stabilité des EPS et des consommateurs d'électricité.
Court-circuit monophasé (K (1)). Un défaut à la terre d'une phase provoque l'apparition d'un courant de court-circuit réseaux électriques 110 kV et plus, en travaillant avec des transformateurs neutres à la terre sourde. La nature des courants et des tensions apparaissant à ce type de dommage de phase Un, explique la figure 1.6, un.
Courant de court-circuit Iak induite par la fem EA, traverse la phase endommagée de la source d'alimentation G et revient à la terre par neutre neutre N transformateurs:
![]() (1.5)
(1.5)
Fig.1.6. Défaut monophasé:
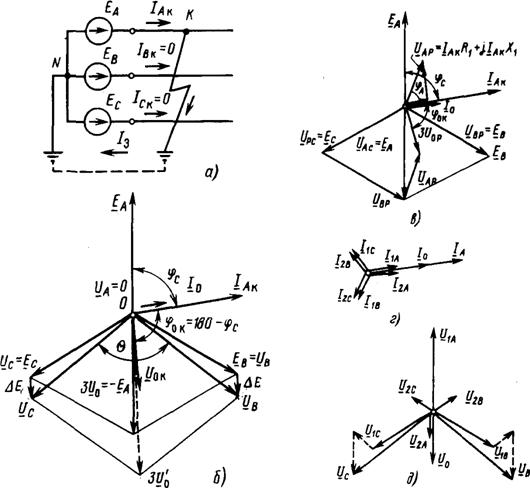
a - régime diagrammes vectoriels des courants et des tensions dans l'emplacement du défaut ( b) et à l'emplacement du relais P (dans le), les courants ( g) et souligne ( d) des composants symétriques à la place du court-circuit
Les résistances inductive et active dans cette expression correspondent à la boucle phase-terre et diffèrent des valeurs des résistances de phase pour les courts-circuits entre phases. Vecteur JeAk est à la traîne le vecteur emf EA à un angle ![]() Dans les phases non endommagées, il n'y a pas de courants.
Dans les phases non endommagées, il n'y a pas de courants.
Tension de phase endommagée Un au point Pour UAC = 0 . Tensions de phases non endommagées *2 Dans le et C égal à la fem de ces phases:
![]() (1.6)
(1.6)
Le diagramme vectoriel pour l'emplacement du défaut est illustré à la Fig. 1.6, b. Tensions entre phases U ABK =U BK; U BCK =U BK-U CK;U CAK =U CK.
Les sommes géométriques des courants de phase et des tensions sont:
Par conséquent, il est clair que courants de phase et les tensions contiennent les composants de l'IR:
![]()
Vecteur Je0 K coïncide en phase avec Je AK vecteur U0 K le contraire de la phase E Un et est égal à 1/3 de la valeur normale (jusqu'à KZ) de la tension de la phase endommagée Un:
U0 K = - 1/3E A = -1/3U AN. Courant Je0 K dépasse la tension U0 K de 90 °.
Diagramme de vecteur au point P pour K (1) est représenté sur la Fig. 1.6, dans le. Courant de phase Un reste inchangé. Tension de phase endommagée
Vecteur U AP est en avance sur JeAk à un angle φк =arctg (Xl (1) /Rl (1)).
Tensions de phases non endommagées Dans le et C ne change pas: U BP =E B; U CP =E C. Tensions entre phases UABPUACP et augmentez. Les vecteurs Je0 P et U0 P sont égaux:
Comme suit du diagramme, U oP U oKmodulo et décalages de phase dus à la présence de résistance active RKP (1) (phase-terre). Nous notons quelques caractéristiques des diagrammes vectoriels (Fig. 1.6, b et dans le):
1) les courants et les tensions de phase forment un système de vecteurs asymétrique et déséquilibré, ce qui indique la présence, en plus des composantes directes de l'OP et du NP;
2) tensions de phase à phase au point Pour supérieur à zéro, l'aire du triangle formé par ces tensions est différente de zéro. Un défaut de court-circuit monophasé est le type de dommage le moins dangereux en termes de stabilité de l'EPS et du fonctionnement des consommateurs.
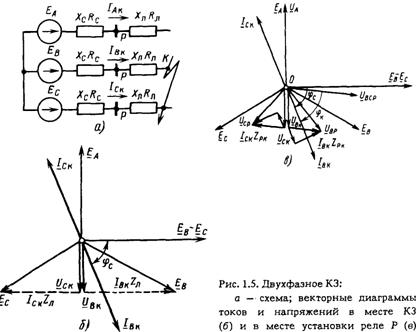
Deux phases court à la terre (K (1,1)). Ce type de court-circuit peut également se produire uniquement dans un réseau avec un neutre mortel (voir Fig.1.2, g). Le diagramme vectoriel du défaut à la terre sur le sol des deux phases est représenté sur la Fig. 1.7 pour les points Pour et R.
Sous l'action de la FEM EDans le et EC dans les phases endommagées Dans le et C
Flux de courant JeVk et JeSk fermeture à travers le sol:
![]() (1.8)
(1.8)
Dans la phase non endommagée, il n'y a pas de courant:
La somme des courants des trois phases par rapport à (1.8) et (1.9) n'est pas égale à zéro: JeAk +JeBk +JeCc =JeK (3) = 3Je0 , les courants totaux contiennent le composant TM.
À la place de la tension de court-circuit des phases endommagées Dans le et C, fermés à la terre, sont égaux à zéro: UBK =UCK = 0. La tension entre les phases endommagées est également nulle: UBCK = 0. Tension de la phase non endommagée UAK reste normal (si l'on néglige l'induction des courants JeVk et JeSk). Au point Pour triangle de tensions entre phases (Fig.1.7, dans le) est convertie en une ligne, et les tensions entre phases entre les phases endommagées et non endommagées U AB et U CA diminuer à la tension de phase U AK.. Diagramme des courants et des tensions pour le point P est construit sur fig.1.7, b.
En relation avec l'augmentation des contraintes UBP et UCP les tensions entre phases augmentent, l'aire du triangle des tensions entre phases augmente et la tension de la tension chute:
![]()
Fig.1.7. Court-circuit biphasé à la terre:
un - régime diagrammes vectoriels des courants et des tensions à l'emplacement du défaut et à l'emplacement du relais P (b) la tension résiduelle et les tensions de phase à l'emplacement du défaut ( dans le) et au point P (g)
Les diagrammes vectoriels pour les défauts à la terre à deux phases ont les caractéristiques suivantes:
1) les courants et les tensions sont asymétriques et déséquilibrés, ce qui provoque l'émergence, en plus des composantes directes de NP et OP;
2) en raison de la forte diminution des contraintes sur le site de la faille, ce type de dommage après K (3) est le plus sévère pour la stabilité du réseau électrique et des consommateurs d'électricité.
Double défaut à la terre (K (1)). Un défaut similaire se produit dans le réseau avec un neutre isolé ou mis à la terre à travers le réacteur de suppression d'arc. Une double fermeture signifie un défaut à la terre sur deux phases à différents points du réseau (K1 et K2 dans la figure 1.8). Sous l'influence de la différence de la force électromotrice des phases endommagées EDans le-EC en phases Dans le et C les courants K3 se posent JeVk et JeSk, en fermant le sol aux points K1 et K2. A ces points et dans les phases endommagées, les courants sont de valeur égale et de phase opposée: JeBq =-
JeSk; courant de phase A non endommagé JeAK = 0.
Un diagramme vectoriel des courants entre l'alimentation et l'emplacement du défaut le plus proche (point K1) sera la même que pour un court-circuit biphasé sans terre (voir § 1.3, Fig. 1.5). La somme des courants de phase dans cette section est nulle ( JeAk +JeBq =JeCc = 0), par conséquent, dans les courants de phase, il n'y a pas de composants du TM.
Sur la section de la ligne d'alimentation entre les points de défaut à la terre K1 et K2 dans les conditions d'alimentation unidirectionnelle, le courant de défaut ne circule que dans une phase (phase Dans le sur la Fig.1.8), c'est-à-dire de la même manière que pour un court-circuit monophasé (voir Section 1.3). Le diagramme vectoriel des courants et des tensions totaux sur cette section est analogue au diagramme pour les défauts monophasés (voir Fig.1.6, b L'induction mutuelle EMF augmente la tension des phases non endommagées et réduit l'angle de déphasage entre elles (0 Δ E n'est pas pris en compte.
Avec les courts-circuits monophasés, la symétrie des courants et des tensions du système triphasé est violée. Sur la base de la méthode des composants symétriques, un court-circuit asymétrique monophasé est remplacé par trois courtes fermetures symétriques conditionnellement triphasées pour les composantes symétriques des différentes séquences. Le courant d'un défaut monophasé est constitué de trois composantes: une ligne droite (I 1), une séquence inverse (I 2) et une séquence zéro (I 0). Les résistances des éléments sont également constituées des résistances de la droite (R 1, X 1, Z 1), inverse (R 2, X 2, Z 2) et des séquences nulles (R 0, X 0, Z 0). En plus des machines à résistance électrique, les séquences aller et retour des éléments sont égales les unes aux autres (R 1 = R 2, X 1 = X 2) et sont égales à leurs valeurs pour un court-circuit triphasé. La résistance de la séquence zéro est généralement beaucoup plus grande que la résistance des séquences avant et arrière. Dans les calculs pratiques, ils sont adoptés pour les câbles à trois conducteurs: pour les jeux de barres: ![]() [L.7]; pour les lignes aériennes :; [L.4].
[L.7]; pour les lignes aériennes :; [L.4].
Pour transformateurs de puissance, ayant un circuit de connexion d'enroulement D ≤ Y n, la résistance de l'homopolaire est égale à la résistance de la séquence directe. Pour les transformateurs ayant un schéma de connexion d'enroulement, les résistances Y ¤ Y et homopolaires dépassent significativement la résistance de la séquence directe.
Le courant de court-circuit monophasé est déterminé:
Ici: - la tension nominale moyenne du réseau dans lequel la panne s'est produite (400 V); - résistance résultante totale de la séquence homopolaire par rapport au point de défaut, mΩ.
La résistance résultante du circuit de défaut est déterminée, mΩ:
Ici: - la résistance inductive équivalente du système externe au transformateur d'alimentation 6-10 / 0,4 kV, rapporté à l'étage LV, mOhm;
- la résistance de la séquence directe du transformateur abaisseur, mΩ;
- la résistance du réacteur, mΩ;
- résistance de jeu de barres, mΩ;
- résistance lignes de câble, mΩ;
- résistance aux lignes aériennes, mΩ;
- résistance des bobines de courant interrupteurs automatiques, mΩ;
- résistance des transformateurs de courant, mΩ;
- la résistance transitoire des joints de contact fixes et des contacts mobiles, la résistance transitoire de l'arc au point de défaut, mΩ;
- résistance homopolaire du transformateur abaisseur, mΩ;
- résistance homopolaire des jeux de barres, mΩ;
- résistance active et inductive de la séquence homopolaire du câble, mΩ;
- Résistance de la séquence zéro ligne aérienne, mOhm.
Pour un système d'alimentation donné (figure 4), il est nécessaire de déterminer les valeurs courant périodique pour des points donnés pour un court-circuit triphasé et monophasé (par la méthode des composants symétriques).
Fig.4. Le schéma de calcul et le schéma de substitution
1. Selon le schéma de calcul, nous formons un circuit de remplacement (figure 4).
2. Nous trouvons la résistance des éléments du court-circuit dans les unités nommées (mΩ).
2.1. Résistance inductive du système externe au transformateur d'alimentation 10 / 0,4 kV (circuits haute tension) (si la puissance de court-circuit sur le côté haut du transformateur est inconnue, vous pouvez accepter).
![]() ; mOm.
; mOm.
2.2. Résistance active et inductive du transformateur d'alimentation (résistance de la séquence directe et inverse: ![]() ,; résistance de zéro post
,; résistance de zéro post
de la loi :,) [L. 7]:
2.3. Résistance des jeux de barres 0,4kV.
Pour les jeux de barres plats en cuivre de dimensions 80 x 10 mm (à une distance géométrique moyenne entre les phases de 15 cm), les résistances actives et inductives spécifiques à courant alternatif car les séquences directe et inverse sont égales, [A.6]. Pour la séquence zéro [L.7]:
Résistances actives et inductives de trois jeux de barres de 0,4 kV direct, inverse et à zéro:
Résistances totales des trois jeux de barres:
2.4. Résistance active et inductive des câbles.
Résistances actives et inductives spécifiques des câbles individuels de séquences directes, inverses et nulles (instructions méthodiques):
Les valeurs des résistances actives et inductives des câbles:
2.5. Résistances actives et inductives des disjoncteurs (y compris la résistance des bobines de décharge de courant et des résistances transitoires de contact) [L.7].
Résistances totales de tous les automates:
3. Courant de court-circuit monophasé pour le point "К 1".
Résistance active et inductive résultante du circuit de court-circuit avec court-circuit monophasé au point "K 1":
Courant de court-circuit monophasé au point "K 1":
4. Courant de court-circuit triphasé pour le point "K 1".
Résistance active et inductive résultante du circuit de court-circuit avec court-circuit triphasé au point "K 1":
Courant de court-circuit triphasé au point "K 1":
4. Directives pour le calcul des courants de court-circuit et la sélection des équipements électriques. Ed. B.N. Neklepayev. - Moscou: Izd. NC ENAS, 2001. - 152 p.
5.Kulikov Yu.A. Processus transitoires dans les systèmes électriques / Yu.A. Kulikov.- Novosibirsk: Izd NSTU, 2002.-283p.
6. Manuel sur la conception de l'électricité, des lignes électriques et des réseaux. Ed. Ya.M. Bolshama, V.I. Krupovich, M.L. Samover. Ed. 2 ème, Pererab. et supplémentaire. - Moscou: Energia, 1974. - 696 c.
7. Manuel sur la conception de l'électricité. Ed. Yu.G. Barybina et autres - Moscou: Energoatomizdat, 1990. - 576 p.
8. Répertoire d'approvisionnement en électricité entreprises industrielles. Sous la Société. Ed. A.A. Fedorova et G.V. Serbinovsky. En 2 livres. Livre 1. Conception et calcul des informations. - Moscou: Energia, 1973. - 520 p.
9. Règles pour l'installation d'installations électriques. - 6 e éd. - Saint-Pétersbourg: Dean, 1999. - 924p.
ANNEXE A